

量子技术很快就会走进你的汽车!
“遇事不决,量子力学”成为非常流行的一句网络用语,除了有人们遇事不决时的烦恼,还有对量子力学高深莫测的敬畏。然而,科技日新月异,量子技术进入我们的生活已经不是梦想。
就在不久前,全球最大的汽车零部件供应商博世成立了量子传感器业务部门,目的就是为了把量子传感器商业化。并且,这一部门隶属于汽车电子,可以说博世就是要把量子技术应用于汽车。
根据博世官网的描述,这一业务部门的首款汽车零部件是个“量子陀螺仪”。其作用与普通的陀螺仪类似,都是感知位置的变化,但是精度却能提升高达100倍!
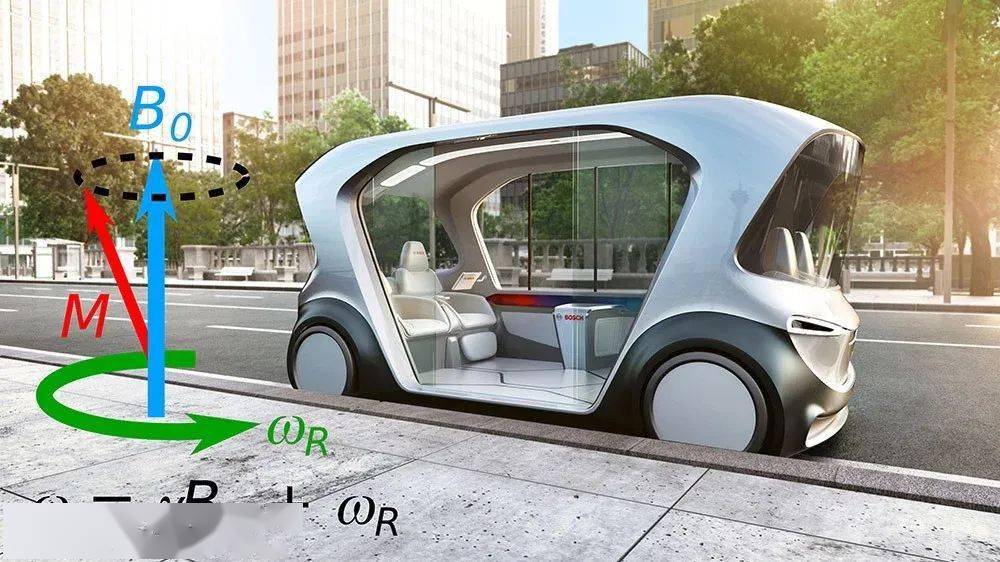
▲量子陀螺仪基本原理
自动驾驶系统需要精确了解汽车自身的位置才能实现,业内目前多通过高精度定位设备和IMU(包含陀螺仪的惯性测量单元)结合起来使用以确定车辆的位置。
尤其是在卫星定位信号有遮挡的区域(如地库、隧道等场景),基本只能靠IMU的姿态数据来估算车辆位置。所以说IMU,或者说陀螺仪对自动驾驶汽车,尤其是L3、L4这样的高等级自动驾驶汽车来说,是必不可少的传感器,并且对精度、稳定性要求极高。
如果博世这个量子陀螺仪当真能实现高达100倍的感知精度,那对于自动驾驶产业来说,显然极具价值。
那么,博世的量子传感器到底是怎么一回事?是怎样一个团队再进行技术研发?他们是如何实现百倍的性能提升的?车东西经过深入研究量子陀螺仪领域的论文,并与北云科技CEO向为等高精定位领域的专家进行交流后,得以揭开博世量子传感器的神秘面纱。
01 .
成立量子传感器BU 已经秘密研发7年
今年2月17日,博世正式宣布成立量子传感器业务部门(BU),并且计划将量子传感器商业化。
为什么要建立一个量子传感器业务部门呢?
按照博世汽车电子副总裁Jens Fabrowsky的说法,在数据处理和传感器方面,量子技术正在突破局限性。
事实也确实如此,量子计算已经远超现有硅芯片的性能,量子技术的规模应用只是时间问题。在量子传感器领域,博世称其相比现有传感器最高有1000倍的性能提升。
因此,早在7年之前,博世就开始研究量子传感器技术。在医疗领域,量子传感器能够更准确地诊断阿尔茨海默症、帕金森氏症等神经系统疾病;也能用于记录神经冲动,可以控制假肢。在汽车领域,量子传感器能感知到物体位置的微小变化,就能用于高精定位。
▲博世研发的量子磁力计
根据研究机构麦肯锡的预测,量子传感器的市场规模将达到70亿美元。巨大的市场规模让博世决定把7年的研究成果商业化,量子传感器业务部门就此诞生。
在人员布局方面,博世聘请Katrin Kobe博士担任量子传感器BU的首席执行官,她拥有物理学博士学位,在多家科技公司拥有超过25年的管理经验。

▲Katrin Kobe博士
根据她的领英资料,她曾在Theron Advisory Group、Laser 2000、Transradio SysnderSysteme Berlin AG等科技公司工作。2021年,她加入博世,并担任Quantensensorik首席执行官。
换句话说,博世虽然没有透露量子传感器BU的名称,但从部门CEO的简历上看,这一部门很可能就叫Quantensensorik,其中包含了量子(quantum)与传感器(sensor)两个词语。
最初成立之时,这个BU共有15名员工,未来几个月,团队规模将增加到20多人,工程师和业务开发人员将会快速增加。
与此同时,博世的量子传感器BU也被纳入了汽车电子部门,在德国的路德维西堡办公。显然,量子传感器BU的工作重点就是汽车传感器,其首个产品很可能就是高精定位中的陀螺仪。
02 .
首个产品是量子陀螺仪 是实现L4关键组件
如今,L2级自动驾驶成为新车标配,L4级自动驾驶也在成为车企、供应商竞相争夺的领域。其中,高精定位成为自动驾驶研发过程中的关键技术。
博世量子传感器BU打造的量子陀螺仪,就是高精定位模块中的重要组件,通常情况下,其内置于IMU(惯性测量单元)内,用于感知车辆偏转的角速度,包括横滚、俯仰、偏转三个姿态。
高精度组合导航定位单元供应商北云科技CEO向为告诉车东西,当前在高精定位行业的量产产品中,大多都采用MEMS(微机械)陀螺仪。
要想搞明白博世量子陀螺仪的原理,得从现在最常用的MEMS陀螺仪开始。
在IMU供应商ADI的官网上,有对MEMS陀螺仪的详细介绍,能够帮助我们理解陀螺仪的工作原理。简单来说,陀螺仪的工作原理就是依靠科里奥利力实现对角速度的测量。
例如从图中A点以同样的力、初速度、角度抛出小球,其每一次的落点都会在B点。但如果圆盘发生转动,小球就会落在B‘点。在这一现象中,转动参考系中观察到的运动物体的加速现象就被称为科里奥利力效应,产生的惯性力就叫科里奥利力。

▲图解科里奥利力
当我们知道A、B、B'之间相对距离以及小球的速度之后,就能够通过计算得出圆盘转动的角速度。
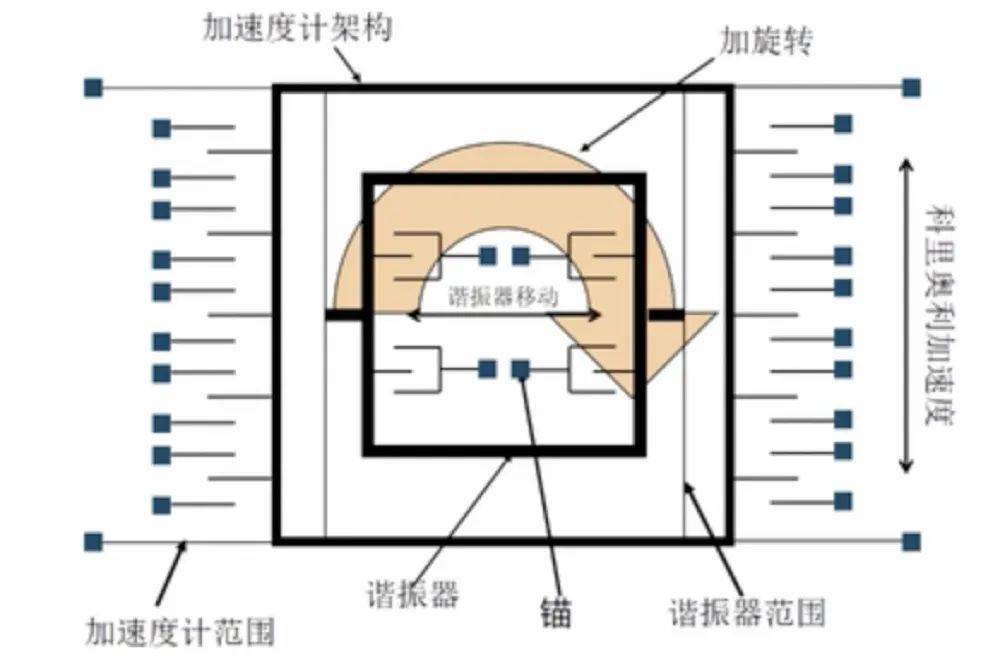
▲MEMS陀螺仪结构
MEMS陀螺仪与其原理相同,使用一个质量块在陀螺仪内部反复震荡。如果因偏转产生科里奥利力时,就能计算得出角速度。在实际应用中,质量块的振荡频率会较高以实现实时测量,同时也会封装多个质量块打造双核、四核陀螺仪避免因震动出现误差。

▲四核MEMS陀螺仪
在高精度定位的IMU模块中,拥有三轴陀螺仪和三轴加速度感应器,陀螺仪用于感知横滚、俯仰、偏转三个方向的角速度偏转,与加速度计配合,实现对位置的感知。
小鹏汽车的停车场记忆泊车就是IMU发挥实力的一个代表性场景。在停车场内,通常没有GPS信号和网络连接,定位相当困难。然而,利用IMU对车身姿态的实时感知,就能感知到车辆当前所在的位置,从而实现无GPS信号条件下定位。
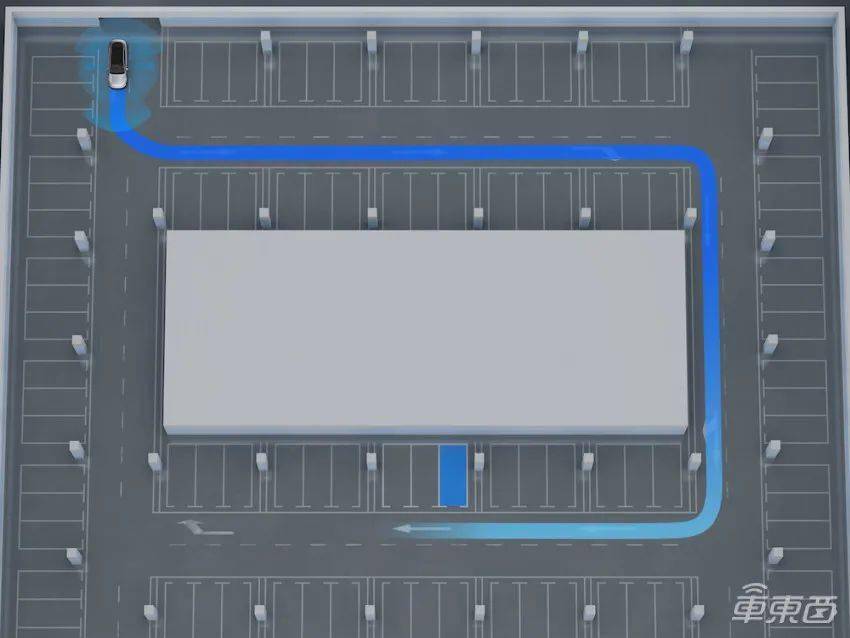
▲小鹏汽车的空间定位和记忆泊车
因此,驾驶员只需要开车进车库一次,让车辆记下整个泊车过程,下一次车辆就能自己开。
在L4级自动驾驶中,IMU惯性测量单元的角色实际上更加重要。可以说,看似不起眼的陀螺仪其实是实现自动驾驶的核心部件之一。
博世要打造的量子陀螺仪,实现的效果和现有MEMS陀螺仪完全相同,但构成和原理却完全不同。
在物理学中,量子代表着构成物质的最小的不可分割的基本单位。博世的量子陀螺仪就采用一种碱金属铷(Rb)和一种稀有气体氙(Xe)打造了MEMS蒸汽陀螺仪,其中铷和氙两种物质都以原子形式存在,每个原子就是构成铷和氙的最小单位。
▲充满铷和氙的气室
博世表示,这种量子陀螺仪能够实现更稳定的位置感知,为提升自动驾驶安全性铺平了道路。
从原理上来说,量子陀螺仪也相比MEMS陀螺仪更为复杂。量子陀螺仪需要有一个密闭的气室,其中混合着铷和氙两种气体。气室的体积并不大,比较小的大约在1~10mm³,较大的有1cm³。

▲量子陀螺仪气室
传感器通过测量气室内原子自旋进动频率变化,从而计算得到角速度。
在下图中,加入了Z轴方向的磁场B,内部的原子就产生了拉莫尔进动现象。加上与磁场方向相同的泵浦光之后,原子就会被极化。接着,在正交于静磁场B方向(X、Y轴平面)外加频率与原子进动频率相等、均匀交变的磁场B1,核自旋回产生核磁共振,并且共振频率等于拉莫尔角频率。
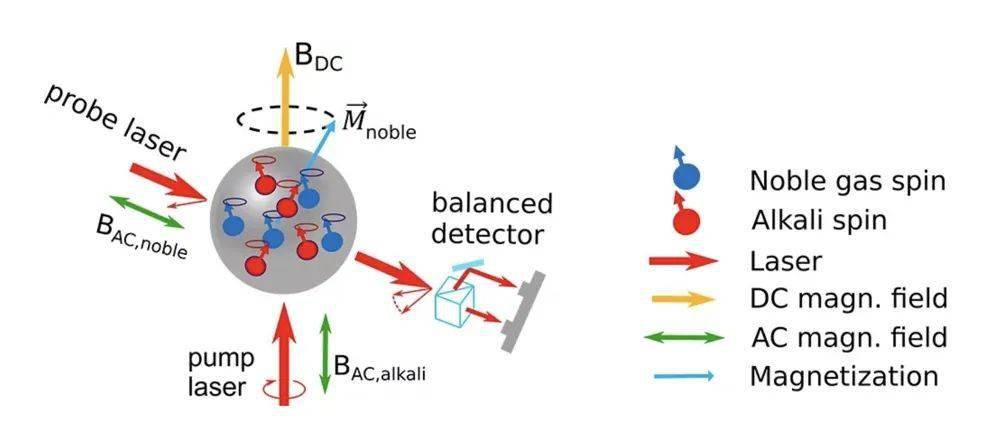
▲量子陀螺仪原理
最后,在X、Y轴平面施加检测激光,检测拉莫尔进动频率,就能够计算出角速度。
实际上,称其为量子陀螺仪只是因为其基于量子原理,在学术界也有核磁共振陀螺仪、原子陀螺仪等名称。

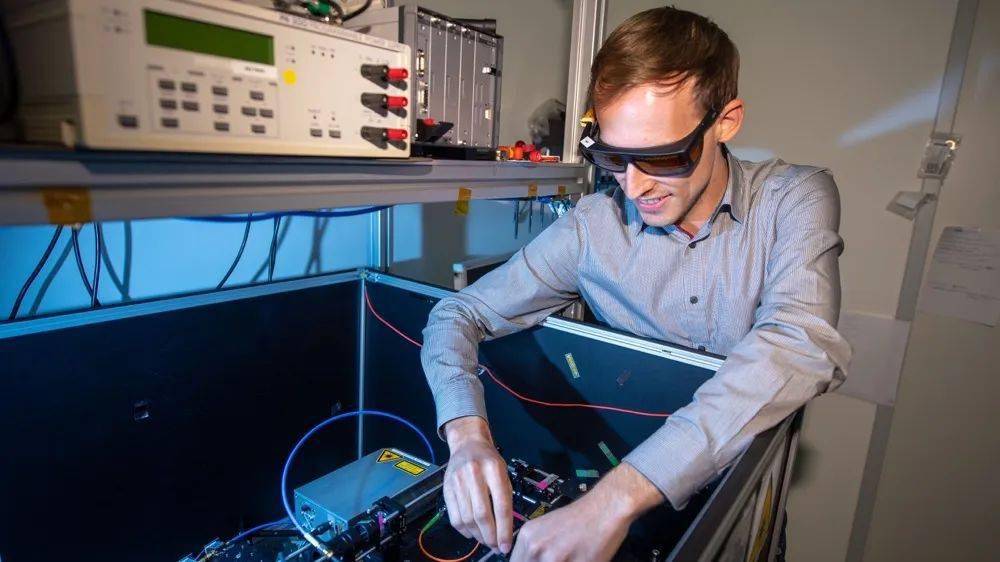
▲博世研发人员正在测试量子陀螺仪
了解完两种陀螺仪的原理之后可以发现,量子陀螺仪的复杂程度相对更高,并且还有较高的技术门槛,那为什么博世还要造量子陀螺仪呢?
答案就在于:量子陀螺仪能够大幅提升定位精度,并且抗干扰能力强,不需要活动部件。因此很有可能在自动驾驶领域广泛应用。
03 .
精度提升百倍 L4能变更简单
实际测试中正是如此。博世的量子陀螺仪实现了0.02deg/hr的零偏稳定性和0.005deg/√hr的角度随机游走值。与现有量产产品比较,博世量子陀螺仪的零偏稳定性相比现有产品有上百倍的提升,角度随机游走也有数十倍的提升,可以大幅度提升定位精度。
换句话说,要实现L4级自动驾驶,变得更简单了。
为什么这么说呢?
北云科技CEO向为介绍,陀螺仪的零偏稳定性、漫漂系数、标度因子与正交误差这几个参数都相当关键。但通常情况下,零偏稳定性较好的陀螺仪,其他几个参数表现也不会差。与此同时,角度随机游走相当于是零偏稳定性的另一种表现形式,因此零偏稳定性就成为衡量陀螺仪性能的关键。
在北云科技的高精度定位组合导航产品中,A1高精度组合导航板卡是最早量产的产品,其中部分型号使用了Epson的IMU模块,零偏稳定性能够达到1.2deg/hr。

▲Epson的一款IMU
向为告诉车东西,零偏稳定性代表陀螺仪测量值与真值的差值。虽然国内外对零偏稳定性的的计量标准有些许差异,但这一数值都代表着零偏的中短期稳定性。同时,陀螺零偏对位置误差的影响表现为随时间变化呈现三次方发散趋势,在高精度定位行业中,这是一项非常重要的指标。
零偏稳定性数值越小,也就代表着误差稳定性表现越好,对于高精度定位模组来说,位置就越容易估计。
向为说道,汽车行业内前装量产的IMU模块,其陀螺仪的零偏稳定性普遍在4deg/hr左右,这也是行业内的主流水平。如果零偏稳定性再高一些,能实现1.2deg/hr的产品已经是业内顶尖。
因此,博世的量子陀螺仪实现零偏稳定性0.02deg/hr和角度随机游走0.005deg/√hr的水平,远超现阶段业内顶尖水平。
“在可以预见的未来,行业内普遍使用的MEMS陀螺仪,其性能难以有巨大突破。近期,北云科技也在关注是否能够通过新的工艺或者技术不断成熟并量产出来。”
例如,硅光子陀螺仪就是陀螺仪业界的前沿,利用硅光子芯片和激光实现对角速度的计算。
谈到硅光子陀螺仪的量产进度,向为说,近几年硅光子芯片快速发展,这一技术距离量产已经越来越近,未来很可能代替现有MEMS陀螺仪成为高精度定位领域的新技术。预计硅光子陀螺仪的零偏稳定性能够比MEMS陀螺仪提升几个数量级,大约是0.0x deg/hr的水平。
比较有趣的是,硅光子陀螺仪的性能竟然和量子陀螺仪的性能非常接近。
因此,硅光子陀螺仪与量子陀螺仪的商业化角逐已经展开,率先以低成本实现商业化才能把握高精度定位的未来。
04 .
结语:自动驾驶带动量子传感器商业化
博世成立量子传感器业务部门,其重要目的之一,就是实现量子传感器的商业化。再深入一层,博世其实想从自动驾驶更深层的基础把握整个市场机遇。
陀螺仪,是自动驾驶系统高精定位模块中IMU内部的一个小组件,其渺小程度有如九牛之一毛。很显然,像博世这样的Tier 1巨头早已拆解了自动驾驶的方方面面,并从各种细枝末节发力。
不过,量子陀螺仪同样有着较高的量产门槛。每年,全球铷产量仅有几吨,大部分以氧化物形式存在,提炼就很困难。加上铷十分活泼,加工运输都是难题。面向可预见的未来,量子陀螺仪的商业化之路还相对遥远。
 电话:
电话: 传真:
传真: 邮箱:
邮箱: 地址:
地址: